

BaseBot™
The GeckoSystems BaseBot is a stripped down self-navigating Mobile Service Robot. It includes the essential mechanical, electronic, hardware, and software components required for a utilitarian MSR.
Educators, hobbyists, and OEM distributors will
purchase this unit for thier own projects.
It will also be the foundation for GeckoSystems' professional healthcare, security, and other business to business product lines.
BaseBot Standards

Power
The power available must be sufficient to drive the locomotion system, sensors, hardware and software onboard the platform. The standard BaseBot will run a minimum of eight to ten hours per charge depending on the power requirements of the application.
Mechanicals
The mechanical component of a BaseBot encompasses the drive system and physical build specifications. The drive system must allow the robot to traverse a 1.5 inch vertical height. A 100 pound payload capacity is needed to support the typical onboard weight and expandability of the platform.
Sensory Systems
The sensory system must support the navigation. At minimum this would mean dual Kinect-type depth cameras. Additional IR range finders and sonar may be added to meet the requirements of the operational environment and application of the MSR. All sensory input is integrated into the SafePath navigation system to create real time self awareness for the BaseBot.
Navigation Software
The final and most unique component of a BaseBot enabled mobile service robot is the navigation software. It is what creates the SafePath™. GeckoSystems proprietary software integrates the sensory data and the locomotion system into a single fluid system. Artificial Intelligence makes it possible for a BaseBot to navigate to a specified destination autonomously while safely avoiding both static and moving objects in the environment. The BaseBot is capable of moving through a loose crowd of workers or pedestrians without harming an individual.
Hardware and Software Architecture
GeckoSuper™
GeckoSuper (originally developed for the CareBot™) interfaces with and coordinates the individual AI behavior software components called GeckoSavants™ that are used in this application. They are listed below:
GeckoSteer™
GeckoSteer is a new mobile robot solution developed to address issues unique to the SafePath wheelchair. Current technologies typically use hardware fixed adjustments to compensate for spasticity, tremor, and other involuntary movements caused by diseases such as cystic fibrosis, Parkinson's disease, and multiple sclerosis. Unfortunately, these fixed adjustments also restrict the operator's freedom of movement. GeckoSteer not only filters out these irregular movements, it also interprets desired direction and speed signals from the joystick, passing them appropriately to GeckoSuper.
GeckoNav™
GeckoNav is automatic, self navigation AI software that enables the wheelchair to be directed to the user's desired destination destination while avoiding potential obstructions reported by GeckoImager to GeckoNav.
GeckoMotorController™
GeckoMotorController manages wheel speeds based on commands from GeckoNav. Individual wheel speeds are controlled to enable steering, maintain straight line runs, and go faster or slower depending on obstacles to be avoided per GeckoNav commands. GeckoMotorController also prevents lurching on starts and stops and enables turns to be bicycle smooth in their execution.
GeckoImager™
GeckoImager provides GeckoNav AI with sufficient and timely vision depth data from Microsoft Kinects to create actionable situation awareness while providing a very safe, loose crowd level of autonomy that provides collision free operation of the now obstacle aware wheelchair.
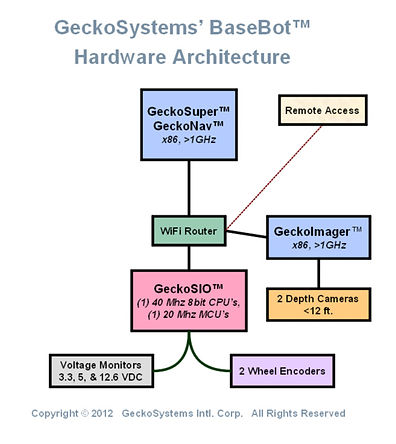

Anatomy of a BaseBot

Top Left:
Wifi router connected to two dual core Intel Atom Mini-ITX's with 1G RAM.
The Blue Ethernet cables connect the router to two dual core Intel Atom Mini-ITX's with 1G RAM and a single board computer (SBC) for motor control.
Top Center:
The power distribution block has separate fusing for each drive motor, computer and the GeckoSIO*.
The red SBC shown uses a 40Mhz 8 bit CPU for the GeckoMotorController.
At the base you see two shock mounted 80G laptop SATA hard drives.
Top Left:
Two horizontal, outward and downward Microsoft Kinect depth cameras with congruent fields of view.
Top Right:
Wifi router. Power cabling conduits.
53A 50VDC MOSFET H bridge motor driver and right angle drive
12VDC permanent magnet gearmotors.
10" diameter microcelluar polyurethane drive wheels
Frame is riveted aluminum for monoque construction.
Group 34 battery compartment for up to 80AH battery.


Top Right:
Two horizontal, outward and downward Microsoft Kinect depth cameras with congruent fields of view.
Mid:
Power cabling conduits.
53A 50VDC MOSFET H bridge motor driver and right angle drive
12VDC permanent magnet gearmotors.
Bottom:
10" diameter microcelluar polyurethane drive wheels with trailing casters.
Frame is riveted aluminum for monoque construction.
Group 34 battery compartment for up to 80AH battery.